The first complete Canute which was presented as my final year project made use of ultrasonic range-finders to detect the water levels in each reservoir and therefore infer that whatever water wasn’t in the reservoir must be in the tube. This worked to a point but since it was only measuring over a 10cm range in the reservoir and the range-finder was only accurate to 0.5cm there were only 20 points along the display tube which it would come to rest. Additionally the ultrasonic range-finders were sensitive to water droplets on the mesh in front of the detector and contact with them and the internal shelf they were on made them temperamental. Another problem was that each of the electric pumps it used required manual priming with hand pumps. This was all manageable but it did require baby sitting.
For the degree show my project would have to be left alone for extended periods so I decided to use the week between the hand-in and the degree show to upgrade it to make use of water pressure sensors instead of the ultrasonic range-finders. I was pleased with their performance, however since I only had the two I had to wait till the day of the show opening to get the third and fully test the system.
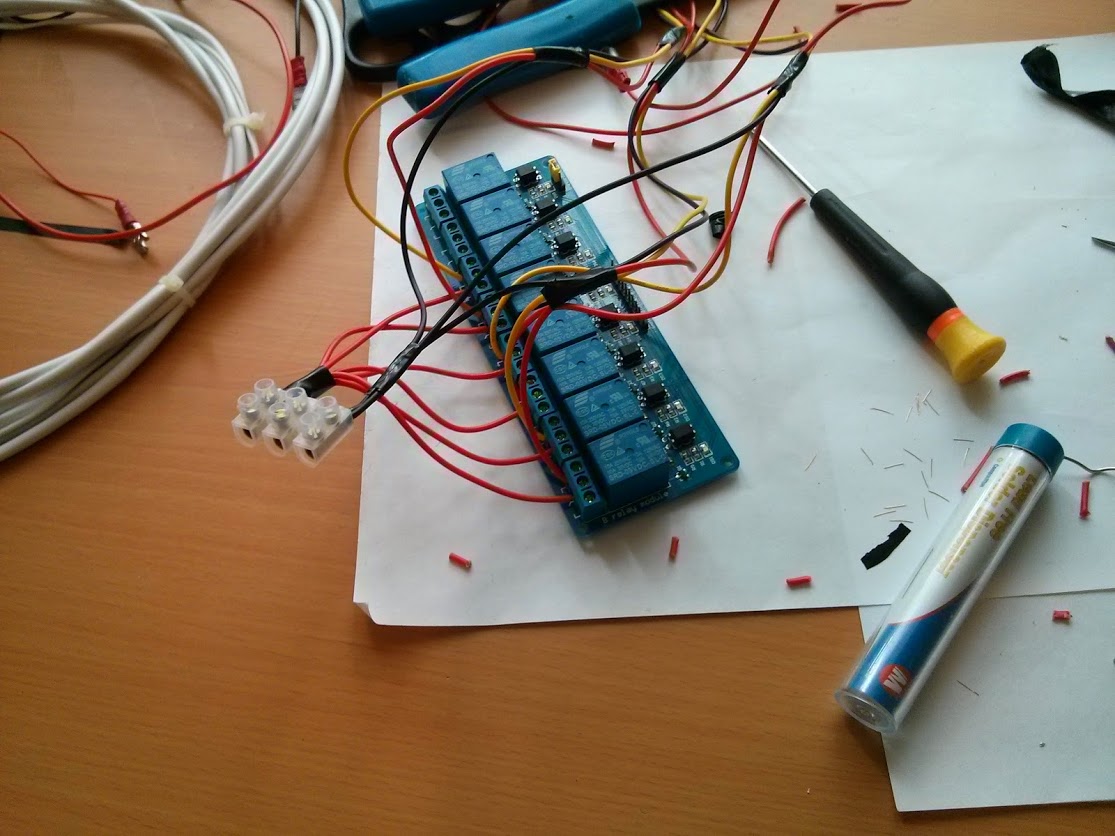
Unfortunately something went wrong on the main relay board controlling the centre tube and something was causing the Arduino to restart, I had a spare Arduino which still crashed, the code had not changed significantly and nobody could identify the cause of the problem. It was a bit disappointing especially since it had been working. Canute was living up to its name, but it was still good to have it at the show, despite the problems.
I hate leaving things unfinished.
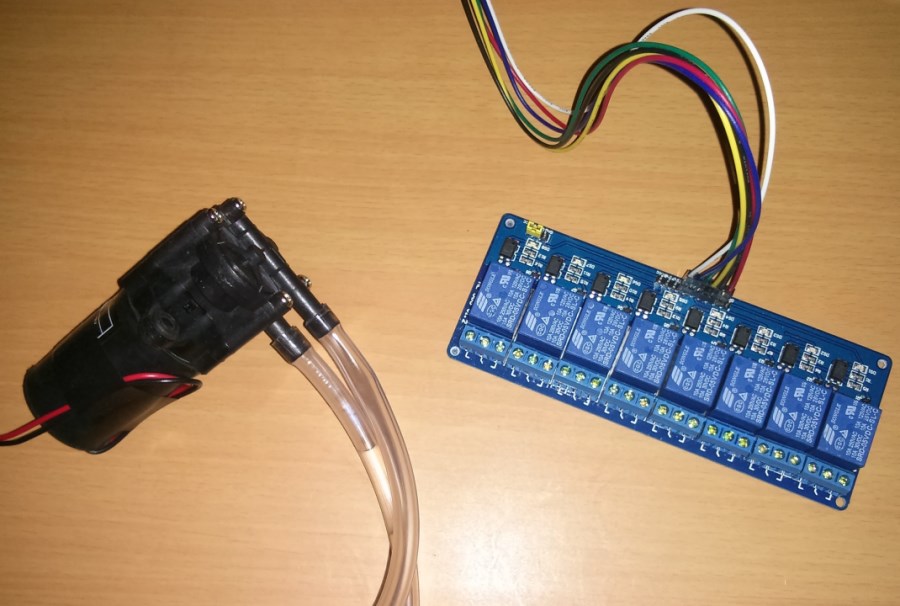
Now there is nothing at stake I’ve began the process of redesigning the electronics and ordering new parts to get Canute working again. The plan this time involves self priming pumps which means I’ll no longer have to worry about pumps running dry or have to lift the tubes in order to prime them. Not having the hand primer pumps taking up room will also be helpful.
Instead of using the circuit boards I soldered myself I will use a prebuilt relay board and also include the Arduino inside the unit. Instead of the lab power supply I used before I’ll use a more compact laptop charger type one which might also be able to fit inside. Ideally I will also include an Ethernet shield so all you have to do is connect the unit to an internet connection and power and it could fetch tidal data that way.
Then of course it’ll be time to start Canute 2.